Elektrofahrzeug-Demonstrator im Maßstab 1:5
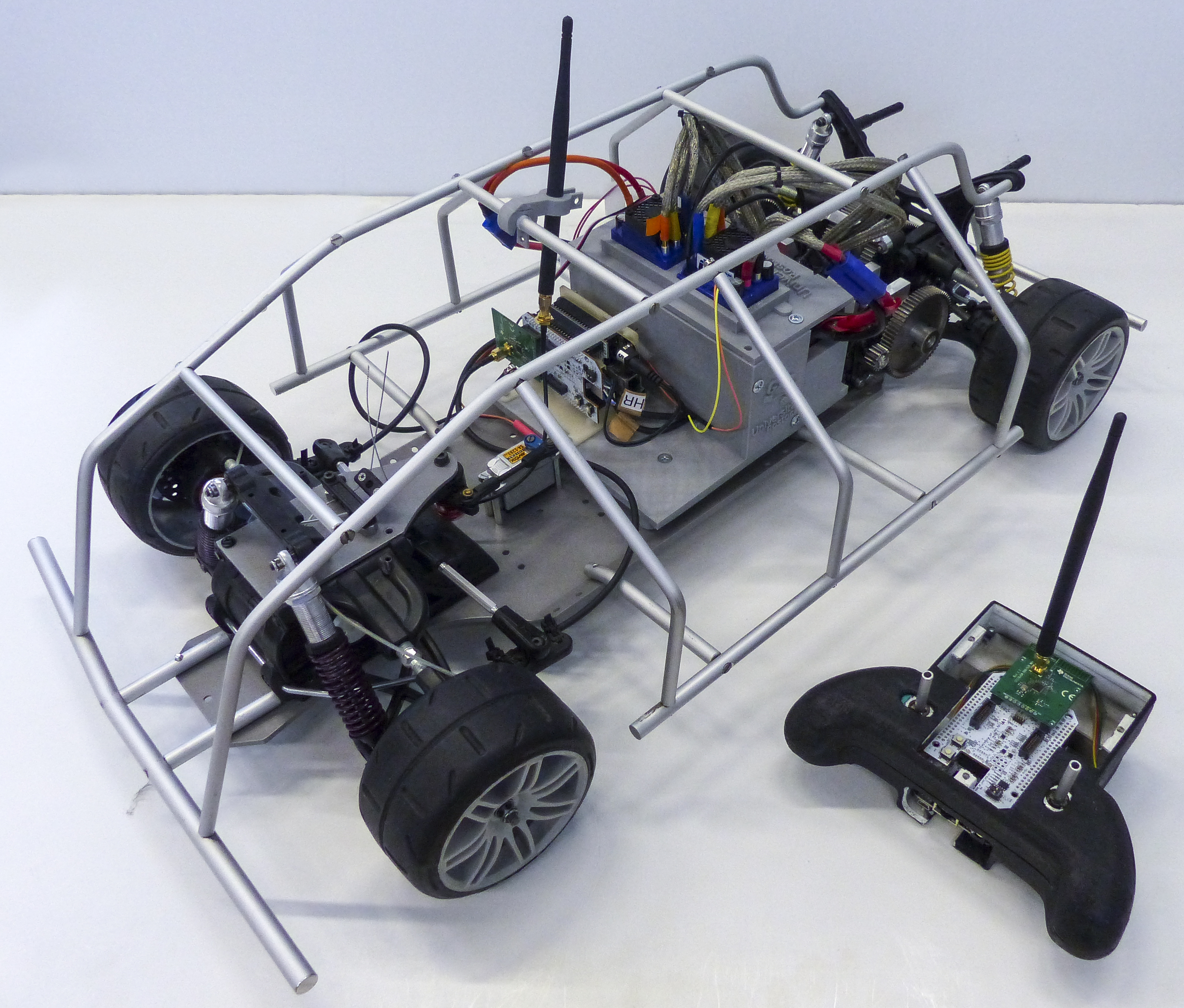
Das Versuchsfahrzeug wurde im Rahmen einer Lehrveranstaltung unter dem Thema "Konzeption und Entwicklung eines elektrifizierten Versuchsfahrzeugs" der Lehrstühle für Getriebe- und Antriebstechnik und Technische Mechanik und Dynamik entwickelt.
Ziele sind, den Umgang sowie die Programmierung mit/von Mikrocontrollern zu erleichtern und elektrotechnische Kompetenzen zu vermitteln. Weiterhin soll die Eignung von maßstäblichen Modellen als Vergleichsmodell für reale Fahrzeuge untersucht werden. Im Rahmen eines vorlesungsbegleitenden Projektes der Lehrveranstaltung „Entwerfen von Antrieben“ wurden Konzepte zum Aufbau eines miniaturisierten Reifenprüfstandes entwickelt. Es sollen Reifenkennlinien aufgenommen werden, um unter anderem den Reifen-Fahrbahnkontakt zu modellieren.
Technische Spezifikationen:
Das Chassis des Versuchsfahrzeugs ist ein seriennahes Modell aus dem RC Bereich der Firma FG Modellsport im Maßstab 1:5. Die Antriebseinheit besteht aus zwei bürstenlosen Gleichstrommotoren des Typs Leopard LBPS4274 mit einer Maximalleistung von 2.6 kW. Von Studierenden entwickelte Getriebestufen dienen zur Übertragung des Antriebsmoments an die Räder der Hinterachse, welche separat angesteuert werden können. Ein elektrisches Differenzial ist in der Steuerung implementiert.
Steuerungskonzept:
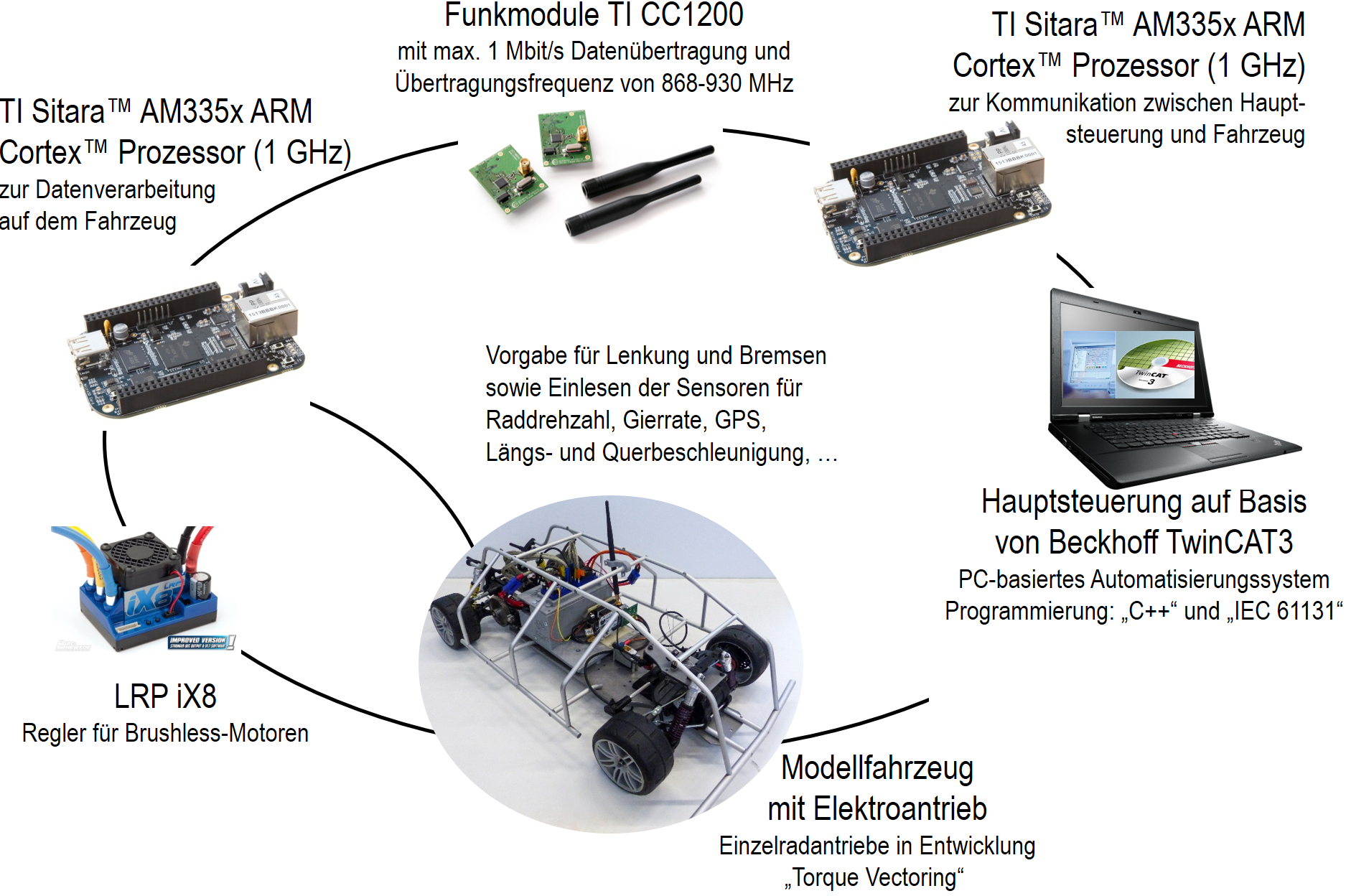
Die Grundlage der Steuerung bilden zwei Prozessorboards (BeagleBone Black) mit ARM Cortex A8 Prozessoren (1 GHz Taktfrequenz). Diese weisen zahlreiche Schnittstellen auf und erfassen insbesondere die Signale der Raddrehzahlsensoren sowie die Beschleunigungen und Gierrate des Fahrzeugchassis. Die Abbildung zeigt die beteiligten Komponenten des Steuerungskonzeptes und deren jeweilige Aufgabe.
Als übergeordnete Steuerung wird eine SPS (Speicherprogrammierbare Steuerung) verwendet. Diese überwacht das Versuchsfahrzeug und regelt dessen Verhalten. Das Prozessorboard der Fernbedienung besitzt die Aufgabe, die Daten der SPS bzw. des Benutzers an das Versuchsfahrzeug zu übermitteln. Auf dem Versuchsfahrzeug befindet sich das zweite Prozessorboard. Dieses empfängt Befehle der SPS, steuert die entsprechenden Aktuatoren an, nimmt die Sensordaten auf und funkt diese zurück an die Fernbedienung bzw. an die übergeordnete Steuerung.