Entwicklungsumgebung für Aktivlenksysteme
Im Rahmen des Forschungsprojektes „Aktivlenksysteme in aufgelöster Modulbaukastenstruktur für unterschiedliche Fahrzeugtopologien“ wurde ein Harware-in-the-Loop Prüfstand als Entwicklungsumgebung für neuartige Aktivlenksysteme entwickelt. Dieser bildet die Lenkreaktionskräfte des zu untersuchenden Fahrzeugs nach, welche von einem echtzeitfähigen Fahrzeug-Simulationsmodell berechnet werden. Die Entwicklung des Fahrzeug-Simulationsmodells erfolgt durch den Lehrstuhl für Technische Mechanik und Dynamik.
Aufbau des HiL-Prüfstandes zur Untersuchung eines Traktor-Lenksystems
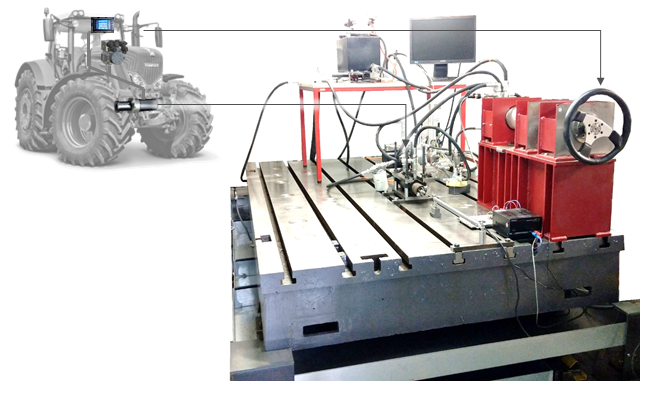
Die zur Nachbildung der Lenkreaktionen erforderlichen Drücke werden mithilfe einer elektro-hydraulischen Aktuatorik realisiert. Die Ansteuerung der elektro-hydraulischen Aktuatorik sowie das Einlesen der Sensoriksignale erfolgt mit dem Steuerungssystem TwinCAT3 der Beckhoff Automation GmbH & Co. KG.
Nachbildung eines Lenkvorganges