Entwicklungsplattform für Fahrzeug-/Bremssystemsteuerungen
Zur Entwicklung von Steuerungen für Bremssysteme insbesondere von elektrifizierten Fahrzeugantrieben wurde eine entsprechende Entwicklungsplattform realisiert. Diese besteht aus einer Trägerkonstruktion mit verschiedenen fahrzeugtypischen Komponenten, u.a. einem Fahrersitz, Pedalerie, Bremssystem inkl. Bremskraftverstärker und ESP-Hydroaggregat.
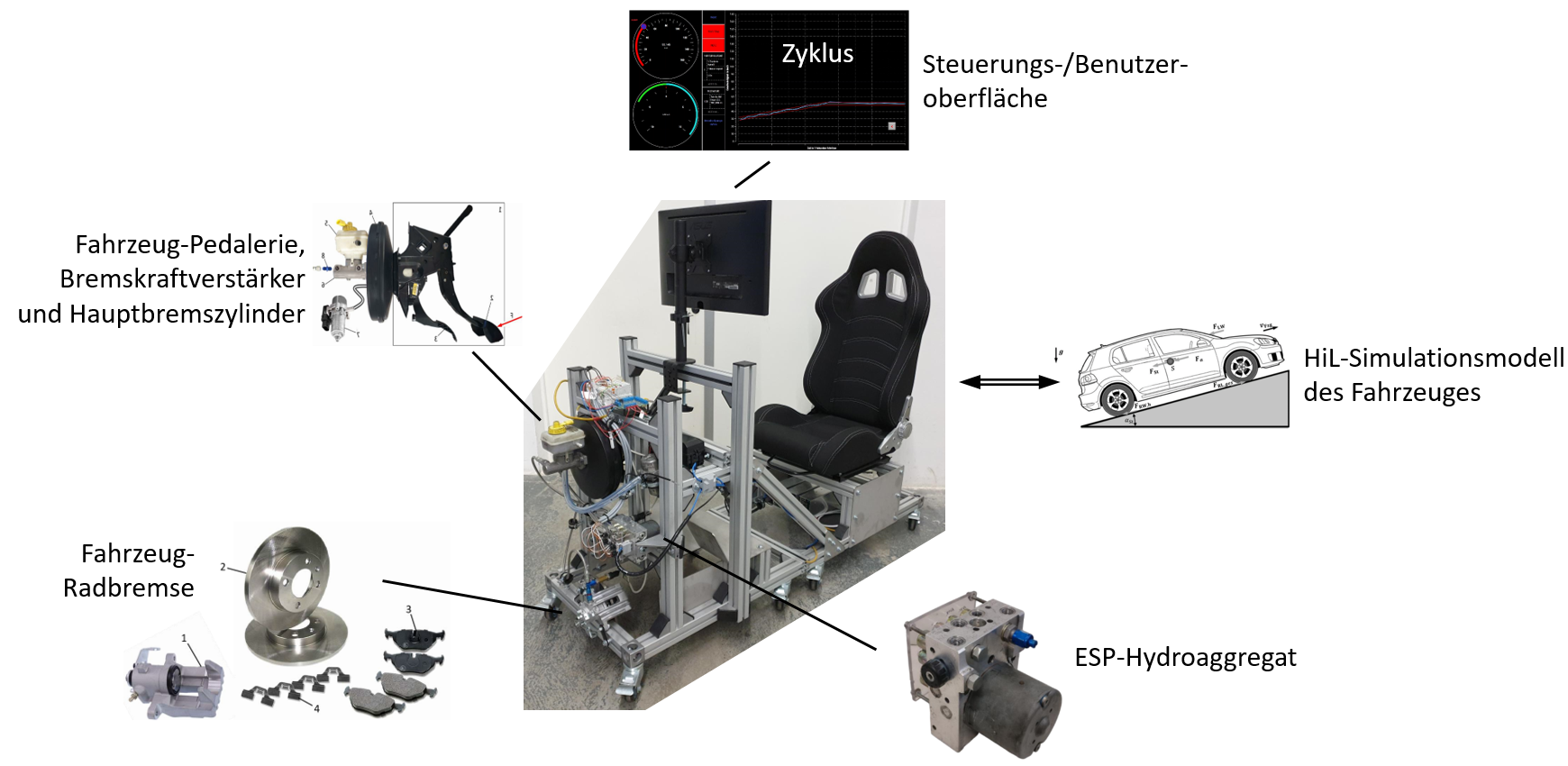
Mittels der Pedalerie kann eine Bedienperson die Längsdynamik eines simulierten Fahrzeugs steuern. Hierfür ist ein Hardware-in-the-Loop-Simulationsmodell sowie eine Benutzeroberfläche in der Steuerung implementiert. Die Benutzeroberfläche liefert diverse Informationen zum Fahrzustand. Zudem kann der Bedienperson ein Fahrzyklus (z.B. NEFZ, WLTP) vorgegeben werden, welcher nachzufahren ist.
Nachbildung eines NEFZ (Neuer Europäischer Fahrzyklus)
Im Rahmen von studentischen Arbeiten wurde die Entwicklungsplattform um eine ABS-Radbremsdruckregelung und entsprechende Peripherie erweitert. Die Algorithmen sind in C/C++ umgesetzt. Die Ansteuerung der Ventile des ESP-Hydroaggregates, der Rückförderpumpe und der Unterdruckpumpe des Bremskraftverstärkers erfolgt über das Steuerungssystem TwinCAT3 der Beckhoff Automation GmbH & Co. KG. Zusätzlich werden die fahrzeugtypischen Sensorsignale (Druck im Hauptbremszylinder) eingelesen. Weitere integrierte Sensorik dient der Überprüfung der Algorithmen.
Radbremsdruckmodulation zur Nachbildung von ABS-Bremsvorgängen
Die Entwicklungsplattform wird über Untersuchungen zu Fahrzeugsteuerungen hinaus in der Lehre und zu Präsentationszwecken bei Veranstaltungen der Universität Rostock verwendet. Eine einfache Möglichkeit zur Parametermanipulation im Simulationsmodell und der Steuerung veranschaulicht die Einflüsse auf das Fahrzeugverhalten.
Weiterhin ermöglicht die Entwicklungsplattform, die Antriebsstrangprüfstände des Lehrstuhls über ein fahrzeugnahes Interface anzusteuern und entsprechende haptische Rückmeldungen zu erhalten.